Design, Development, and Evaluation, of a Drop-Off Detection System for Robotic Wheelchairs
Mario John Bermudez1 , Edmund Frank LoPresti2 , Casimir Mostowy2 , Vinod Sharma3
1 Department of Biomedical Engineering, University of Miami, Coral Gables, FL
2 AT Sciences, Pittsburgh PA
3 Department of Rehab Science and Technology, University of Pittsburgh, Pittsburgh, PA
ABSTRACT
This paper describes the design, development, and evaluation of a drop-off detection system that would protect wheelchair/scooter users with fine motor, visual, or cognitive impairments from driving off a curb, staircase, or other drops. Using four infrared sensors positioned at four different angles, this system detected drop-offs with a high success rate (98%), zero false-negatives, and maintained functionality on any kind of surface tried thus far.
KEYWORDS
Drop-off detection, Robotic, Wheelchair, Infrared sensor, Assistive device
BACKGROUND
More than 6.8 million individuals use mobility assist devices such as wheelchairs, scooters, canes, and walkers (1). Whether it is the user’s unfamiliarity or physical limitation, the mobility aids are not always safe and unfortunately, injuries do occur. Forty-eight percent of wheelchair-user injuries occur when traversing on or near ramps, inclines, curb cuts, stairs, or other drop-offs (2). With such a high percentage related to changes in elevation of the navigating surface, it obviates the need for an effective and reliable drop-off detection system that can be used with these devices. There is prior technology and attempts in finding a drop-off detection solution but they have proven to be cost prohibitive and unreliable (3, 4). Fortunately, in regards to developing a complete obstacle avoidance system, results have been more promising in the detection of upright obstacles (5). If a drop off detection system can be created, the idea of having a disabled individual completely safe and independent will become much more of a reality.
DESIGN CRITERIA
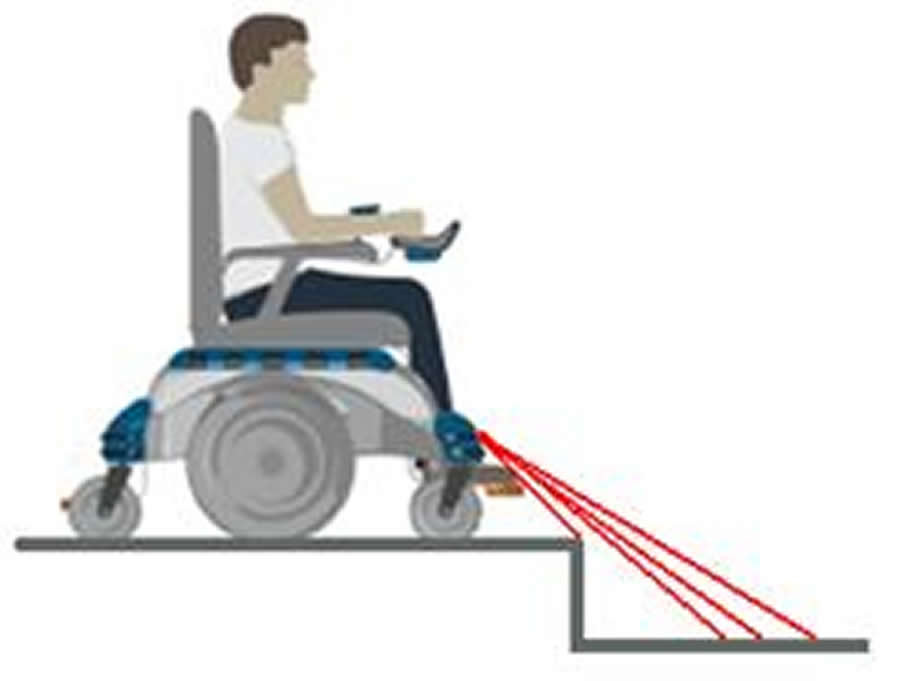
Figure 1
The answer to this drop-off detection problem should be a reliable and cost effective solution which can be mounted on various mobility aids without compromising the activities of daily living (ADL) of the user. It should maintain user comfort and provide enough time to react to the precarious situation; detecting and reporting the drop-offs 30-50cm in advance.
METHODS
Keeping in mind that this drop-off detection system is meant to be a low-cost solution, I found two potential options: an infrared sensor (IR) or an ultrasound sensor (Sonar). Devices such as a laser scanner used with the Nurion Pathfinder Wheelchair are too expensive and bulky to be a practical solution for this problem (6).
In order for the end result to work, this being a wheelchair safely stopping before reaching the drop-off, this system will have to detect these drop-offs far enough in advance so that the chair can come to a gradual stop. In order to do that, these sensors will have to “look” ahead of the chair. When these sensors emit their signal towards the surface in front of them, the signal needs to return to the detector so that a measurement can be made. This is area in which using Sonar becomes ineffective. The sound wave that is emitted towards the ground will be reflected but continue in its direction away from the emitter, thereby eliminating Sonar as an option.
Infrared sensors also emit a signal that is sent towards the ground, and even though some of that signal behaves similar to the Sonar and reflects away from the emitter, enough of the emitted signal returns to the detector providing the proper information and due to the IR signal being modulated, it is less influenced by natural IR emitters in the environment. Therefore I chose to use Sharp’s GP2Y0A02YK infrared rangefinder for its low cost and effective working range.
The next thought was to find the best angle to position the IR sensor. Before we could begin to answer that question, we had to figure out what a reasonable stopping distance for a power wheelchair was. Through some quick testing and research, we determined that a power wheelchair, traveling at a safe speed, can stop in 25 cm. With this fact, we can then start to vary the sensor angles to find if that they can detect a drop-off at distance that after traveling 25 centimeters, the user and the wheelchair are still safe.
Trying to determine the optimum sensor, we placed the sensors at different angles at a fixed height, with different surfaces in its view, I observed and recorded the measured distances and noticed that there was an angle in which the sensor data becomes more erratic but more importantly, we noticed that there were surfaces that make the sensor data erratic at any angle. Noticing this behavior, we understood that we would not be able to detect drop offs if we set a simple distance threshold, because as the surface changed, so did the magnitude of the signal which in turn would give false distance readings. We then decided to implement some programming that could calibrate these sensors as the surface varied so that the sensors could adapt to the surface changes. We also attached a LED and an audio indicator to the system so that during testing, we can see and hear the system detect a drop off.
DATA & RESULTS
 Figure 2
Figure 2Our data values (in centimeters) represent the distances measured by each IR and then a fifth column representing the size of the drop off that is determined through the programming. We tested on concrete sidewalk, black asphalt, green carpet, dark-rough (Chattahoochee) sidewalk, brown carper, aluminum sheet, white paper, and combinations of these with one surface acting as the navigating surface and another being the surface below the drop-off.
IR0 |
IR15 |
IR30 |
IR45 |
Drop Off |
38 |
48 |
56 |
63 |
2 |
37 |
47 |
55 |
65 |
2 |
37 |
48 |
57 |
66 |
1 |
38 |
48 |
55 |
68 |
3 |
37 |
47 |
57 |
64 |
1 |
This table shows IR0 (Infrared sensor position at 0 degrees) measuring the height of the four sensors which stays relatively constant, and IR15,IR30, and IR45, measuring a distance further ahead of the wheelchair, all of which should be constant if the surface is flat as in this case it was of continuous sidewalk it was. The Drop Off column is measuring any changes in elevation. If a value of 10 or greater is calculated, then our program accepted it as a drop off and activated our indicator.
IR0 |
IR15 |
IR30 |
IR45 |
Drop Off |
38 |
44 |
55 |
66 |
3 |
38 |
43 |
51 |
65 |
5 |
37 |
44 |
58 |
69 |
5 |
38 |
43 |
56 |
69 |
6 |
38 |
42 |
51 |
69 |
5 |
This table shows similar information but on a different surface. The reasoning for the small variances is that a black surface absorbs more IR from the sun than a white surface (like the concrete sidewalk) and therefore emits a bit more of its own IR radiation which our sensor does detect, but not enough to trigger the drop-off threshold of 10 due to our programming.
IR0 |
IR15 |
IR30 |
IR45 |
Drop Off |
38 |
255 |
255 |
73 |
168 |
38 |
255 |
255 |
98 |
168 |
38 |
255 |
255 |
60 |
171 |
38 |
255 |
255 |
78 |
168 |
38 |
255 |
255 |
69 |
168 |

Figure 3
This data shows what happened before we implemented our sensor calibration program. IR0 and IR45 are measuring a black asphalt surface while IR15 and IR30 are measuring an aluminum surface. The reflectivity of the aluminum contrasted with the black asphalt sends false positives because our program didn’t understand that it was a different surface. With the new program, our sensors can adjust to their surface and correctly detect a drop.
IR0 |
IR15 |
IR30 |
IR45 |
Drop Off |
49 |
62 |
115 |
106 |
26 |
49 |
63 |
120 |
80 |
31 |
48 |
63 |
143 |
77 |
48 |
48 |
62 |
126 |
92 |
14 |
48 |
62 |
124 |
89 |
33 |
IR0 is measuring a greater height because it is detecting the first step’s surface as is IR15, while IR30 and IR45 are detecting the concrete sidewalk below that step.
DISCUSSION/CONCLUSION
Using the four sensors at four angles and our calibration program, we were able to obtain very promising results and optimistic ideas for improvement. With an average 98% successful drop-off detection and 2% false positives, we have so far developed a safe and cost effective solution to the drop-off detection necessity. More testing needs to be done to make sure this system works in all surfaces in all situations that a wheelchair user might find themselves in. Another area of improvement would be to improve our calibration program to better our current success rate on all surfaces such as asphalt and the aluminum sheet which had success rates of about 90%. Even though our results seem promising with our current configuration, it is always worth looking into if there are more advantageous arrangements of sensors or adding additional sensors, such as another IR or a Sonar component.
REFERENCES
- Kaye, HS. Kant, T. LaPlante, MP. "Disability Statistics Report-- Mobility Device Use in the United States", June 2000. Washington DC: US Dept. of Education, National Institute of Disability and Rehabilitation Research
- R. Lee Kirby RL, Stacy A. Ackroyd-Stolarz SA. Wheelchair Safety-adverse reports to the United States FDA. American Journal of Physical Medicine and Rehabilitation .Vol. 74, No.4, July/August 1995 pp. 308-312.
- Kelly DL. (1999). The enhancement of mobility for individuals who are both physically and visually disabled. Proceedings of the RESNA 1999 Annual Conference
- Cabassa-Miranda E, LoPresti EF, Mostowy C, Sharma V. (2008). Development and Testing of a New Drop-Off Detection System for Powered Wheelchairs. Proceedings of the RESNA 2008 Annual Conference.
- Simpson, RC. Smart wheelchairs: A literature review. Journal of Rehabilitation Research & Development. Vol. 42 No. 4 July/August 2005 pp. 423-438
- Hayashi, S.T., LoPresti, E.F., Simpson, R.C., Nourbaksh, I., Miller, D. (2002) An expensive, alternative drop-off detection method Proceedings of the RESNA 2002 Annual Conference
ACKNOWLEDGEMENTS
The funding for this research was provided in part by the National Science Foundation, Project EEC 0552351
AUTHOR CONTACT INFORMATON
Mario John Bermudez
University of Miami
Coral Gables, FL
7705 S.W. 86th Street Apt. B212
Miami, FL 33143